




پروژه روباتیک و موتور گیربکس ربات متحرک
روباتیک و موتور گیربکس ربات متحرک-رباتها دستگاههای مکانیکی مجهز به هوش مبتنی بر نرم افزار هستند که میتوانند وظایف فیزیکی خاصی را انجام دهند. انواع مختلفی از رباتها و برنامههای کاربردی رباتیک وجود دارد. رباتها متناسب با کاربردشان طراحی شدهاند و طراحی مکانیکی، بدنه، الکترونیک و نرمافزار آنها بر این اساس طراحی شدهاند. وسایل نقلیه روباتیک یا اتومبیلهای رباتیک یکی از انواع طرحهای رباتیک هستند. ماشینهای رباتیک برای حرکت در سطوح ساده طراحی شدهاند که میتوانند وظایف خاصی را از طریق کنترل از راه دور یا به صورت مستقل انجام دهند. آنها مجهز به حسگرها، مدارهای کنترلی و محرک برای عملکرد خود هستند.
حرکت چنین رباتی به خودی خود نیاز به استفاده از موتور دارد. انواع مختلفی از موتورها وجود دارد که میتوانند در کاربردهای روباتیک مورد استفاده قرار گیرند. هر نوع موتور برای اهداف متفاوتی استفاده میشود. موتورها به حرکت ربات کمک میکنند و همچنین به عنوان محرک در طراحی مکانیکی ربات عمل میکنند.
یک برنامه رباتیک ممکن است شامل انواع حرکت زیر باشد:
- عمودی – حرکت بخشی از ربات به بالا و پایین معمولاً با چرخش شانه.
- شعاعی – حرکت بخشی از ربات به داخل و خارج.
- چرخشی – چرخش در جهت عقربههای ساعت یا خلاف جهت عقربههای ساعت حول محور عمودی یا افقی یا حول یک صفحه در قاب سه بعدی.
- حرکت گام – حرکت بالا و پایین با حرکت چرخشی همزمان.
- حرکت رول – چرخش بخشی از ربات با اشاره به بقیه بدنه رباتیک در یک محور موازی.
- انحرافی – حرکت چرخشی به سمت راست یا چپ بخشی از ربات.
- حرکت جنبی یا جنبشی – حرکت ربات بر روی یک سطح یا در یک محیط.
تمام این انواع حرکت، با کمک موتورها یا پمپهای مختلف، مونتاژ شده و همراه با سیستمهای انتقال و پایانهها تحقق مییابد. در این مقاله، استفاده از موتورها برای ارائه حرکت اولیه به خود ربات یا بخشی از آن مورد بحث قرار خواهد گرفت. این مقاله انواع مختلف موتورها، کاربردهای آنها، انتخاب موتور و طراحی یک ماشین روباتیک را بررسی میکند.
انواع موتور
انواع مختلفی از موتورها در صنعت موجود است. برای کاربردهای روباتیک، انواع خاصی از موتورها وجود دارد که معمولاً مورد استفاده قرار میگیرند. موتورهایی که معمولاً در کاربردهای روباتیک استفاده میشوند را میتوان به صورت زیر طبقه بندی کرد:
- AC
- DC جاروبکی
- DC بدون جاروبک
- سروو موتور
- موتور پله ای
- DC دندهای ( موتور گیربکسدار )
1. موتور AC :
موتورهای AC توسط جریان AC به حرکت در میآیند. آنها معمولاً در کاربردهای سنگین که در آن گشتاور بالا (حمل بار یا ظرفیت تحمل بار بالا) مورد نیاز است استفاده میشود. به همین دلیل است که از این موتورها در خطوط مونتاژ روباتیک مستقر در واحدهای تولیدی استفاده میشود. رباتهای متحرک معمولاً از منابع DC (باتری یا سری باتری) تغذیه میشوند، به همین دلیل است که موتورهای AC به ندرت در چنین روباتهایی استفاده میشوند.
2. موتور DC جاروبکدار (معمولی) :
موتورهای DC برسدار از برسها برای هدایت جریان بین منبع و آرمیچر استفاده میکنند. انواع مختلفی از موتور DC برسدار وجود دارد، اما در رباتیک از موتورهای DC آهنربای دائم استفاده میشود. این موتورها به نسبت گشتاور به اینرسی بالا معروف هستند. موتورهای DC براش توانایی ارائه گشتاور سه تا چهار برابر بیشتر از گشتاور نامی خود را دارند. این دسته از موتورهای DC براشدار از شش جزء مختلف تشکیل شده اند: محور (شفت یا شافت)، کموتاتور (کلکتور)، روتور (آرمیچر)، استاتور، آهنربا و جاروبک ( زغال، برس یا براش ).
موتورهای براش DC دو ترمینال دارند. هنگامی که ولتاژ در دو ترمینال اعمال میشود، یک سرعت متناسب به شفت موتور DC براشدار اعمال میشود. یک موتور DC براش از دو قطعه تشکیل شده است: استاتور که شامل محفظه، آهنرباهای دائمی و جاروبکها است و روتور که از شفت خروجی، سیمپیچها و کموتاتور تشکیل شده است. استاتور آن ثابت میماند، در حالی که روتور نسبت به استاتور میچرخد. استاتور یک میدان مغناطیسی ثابت ایجاد میکند که روتور را احاطه کرده است.
روتور که آرمیچر نیز نامیده میشود از یک یا چند سیم پیچ تشکیل شده است. وقتی این سیمپیچها انرژی میگیرند، میدان مغناطیسی تولید میکنند. قطبهای مغناطیسی این میدان روتور به سمت قطبهای مخالف تولید شده توسط استاتور جذب شده و باعث چرخش روتور میشود. همانطور که موتور میچرخد، سیمپیچها به طور مداوم در یک توالی متفاوت انرژی میگیرند تا قطبهای مغناطیسی تولید شده توسط روتور از قطبهای تولید شده در استاتور عبور نکنند. این سوئیچینگ میدان در سیمپیچهای روتور، کموتاسیون نامیده میشود.
تصویری که ساختار موتور DC براش را توضیح میدهد

شکل 1: تصویری که ساخت موتور DC برس را توضیح میدهد
3. موتورهای DC دندهای یا گیربکسدار :
موتورهای DC دندهای، تنوع پیشرفتهای از موتورهای DC جاروبکی هستند. آنها یک مجموعه دنده متصل به موتور دارند. سرعت موتور بر حسب چرخش در دقیقه (RPM) اندازه گیری میشود. سرعت موتور با افزایش گشتاور به کمک مونتاژ چرخدنده کاهش مییابد. با استفاده از ترکیب صحیح دندهها برای موتور میتوان سرعت موتور DC را با افزایش گشتاور کاهش داد. این امر باعث ایجاد ثبات در چرخش موتور میشود و میتوان موتور را به صورت کنترل شده متوقف یا تغییر سرعت داد.
موتورهای DC در محدوده مشخصی از ولتاژ کار میکنند و ولتاژ ورودی بالاتر، RPM بالاتر تولید میکند. به عنوان مثال، اگر موتور در محدوده 6-12 ولت کار کند، کمترین RPM را در ولتاژ ورودی 6 ولت و حداکثر دور در دقیقه را در ولتاژ ورودی 12 ولت دارد.
گشتاور و نسبتِ دنده
عملکرد چرخدندهها در چنین موتوری بسیار جالب است. این بر اساس اصل بقای تکانه زاویهای است. چرخدندههایی که شعاع کمتری دارند، دور در دقیقه بیشتری را نسبت به چرخدندههایی که شعاع بزرگتر دارند پوشش میدهند. با این حال، دنده بزرگتر گشتاور بیشتری به دنده کوچکتر میدهد و بالعکس. مقایسه سرعت زاویهای بین دنده ورودی (چرخدندهای که انرژی را انتقال میدهد) به دنده خروجی نسبتِ دنده را نشان میدهد. هنگامی که چند چرخدنده به یکدیگر متصل میشوند، بقای انرژی دنبال میشود. جهتی که چرخ دنده دیگر در آن میچرخد همیشه مخالف دنده مجاور آن است. در هر موتور DC، RPM و گشتاور نسبت عکس دارند. بنابراین چرخدندهای که گشتاور بیشتری دارد، دور در دقیقه کمتری را ارائه میدهد و مکالمه میکند. برای کنترل یک موتور DC دندهای، از تکنیک مدولاسیون عرض پالس استفاده میشود.
گشتاور و RPM یک موتور DC دنده ای به نسبت دنده بستگی دارد. به عنوان مثال، فرض کنید یک موتور DC ممکن است با سرعت 12000 RPM کار کند و گشتاور 12 کیلوگرم بر سانتیمتر را ارائه دهد. با اضافه کردن دنده 225:1 میتوان سرعت موتور را کاهش داد و گشتاور را افزایش داد. بنابراین، با اضافه کردن دنده 225:1، دور حاصله به 53.3 (12000 دور در دقیقه / 225) کاهش مییابد و گشتاور به 22.5 کیلوگرم در سانتیمتر (0.1 x 225) افزایش مییابد. موتور در حال حاضر قادر است وزن بیشتری را با سرعت معقول جابه جا کند.
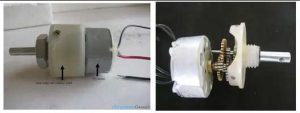
شکل 2: نمای نزدیک موتور DC براش (چپ) و موتور DC دندهای(راست)
درایور موتور DC
برای کنترل موتورهای DC دندهای، IC درایور موتور L293D معمولاً در رباتهای سرگرمی استفاده میشود. آیسی با یک میکروکنترلر ارتباط دارد تا جهت و سرعت موتور DC را کنترل کند. کنترل کننده موتور به عنوان وسیلهای واسط بین موتور، کنترل کننده و باتریها عمل میکند. اگرچه میکروکنترلر سرعت و جهت موتور را تعیین میکند، اما به دلیل توان خروجی محدود نمیتواند مستقیماً موتور را کنترل کند. حتی کنترل کننده موتور میتواند نیروی موتور را تامین کند اما نمیتواند به موتور دستور دهد که در کدام جهت باید بچرخد. بنابراین، کنترل کننده موتور و میکروکنترلر برای کنترل موتور باید با هم کار کنند.
برای کنترل موتور DC، مدار H-Bridge مورد نیاز است که اجازه میدهد ولتاژ در یک بار در هر جهت اعمال شود. L293D یک مدار مجتمع (IC) درایور موتور پل H دوگانه است. درایورهای موتور به عنوان تقویت کننده جریان عمل میکنند زیرا سیگنال کنترل جریان پایین را دریافت میکنند و سیگنال جریان بالاتری را ارائه میدهند. این سیگنال جریان بالاتر برای به حرکت درآوردن موتورها استفاده میشود. این مدار مجتمع، دارای 16 پین با پیکربندی پین زیر است:
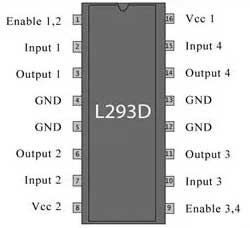
شکل 3: نمودار پین آی سی L293D مورد استفاده در موتور DC ربات ها
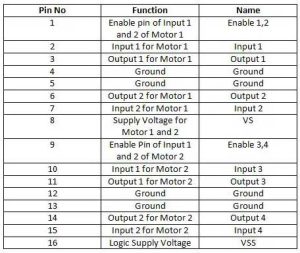
شکل 4: جدولی که پیکربندی پین ها را در یک موتور DC نشان میدهد.
آیسی میتواند تا 1 آمپر جریان داشته باشد و بین 4.5 تا 36 ولت کار کند. برای اطلاعات بیشتر در مورد آیسی درایور موتور، به مرجع آیسی L293D مراجعه کنید.
اثر مشخصه قیمت در انتخاب موتور
موتورهای کوچک برای کاربردهایی طراحی شدهاند که فشردگی بیش از گشتاور است. در حالی که موتورهای کوچک با گشتاور بالا وجود دارند، این موتورها گران هستند زیرا از آهنرباهای خاکی کمیاب، یاتاقانهای با راندمان بالا و سایر ویژگیهایی استفاده میکنند که به هزینه آنها میافزاید. موتورهای بزرگ ممکن است گشتاور بیشتری تولید کنند اما نیاز به جریان بالاتری نیز دارند.
موتورهای با جریان بالا به باتریهایی با ظرفیت بیشتر و مدارهای کنترلی بزرگتری نیاز دارند که بیش از حد گرم نمیشوند و در زیر بار نمیسوزند. بنابراین، برای تطبیق اندازه موتور با بقیه ربات، عاقلانه نیست که یک ربات کوچک را با یک موتور بزرگ و اضافه بار درست کنید. هنگام تصمیم گیری در مورد اندازه موتور، گشتاور موجود، پس از کاهشِ دنده، باید در نظر گرفته شود. کاهش دنده همیشه باعث افزایش گشتاور میشود. افزایش گشتاور متناسب با میزان کاهش دنده است. بطور مثال، اگر کاهش 3:1 باشد، گشتاور حدود سه برابر افزایش مییابد.
4. سروو موتور
سروو موتورها معمولاً در جاهایی استفاده میشوند که حرکت چرخشی دقیق مورد نیاز است. آنها اغلب در بازوهای روباتیک و برنامههای کنترل زاویه استفاده میشوند. در مورد سروو موتورها و کنترل آنها در آموزش سروو موتور بطور جداگانه بحث میکنیم.
5. استپر موتور
یک موتور پلهای، چرخش را به چند مرحله تقسیم میکند. همانطور که سروو موتور با یک زاویه خاص میچرخد، موتور پلهای نیز با تعداد مشخصی از پلههای زاویهای میچرخد. در مورد موتور پله ای در آموزش استپر موتور بطور جداگانه بحث میکنیم.
.
6. موتور DC بدون جاروبک (براشلس)
موتورهای DC براشلس در ساخت و ساز شبیه به موتورهای DC Brushed هستند. اما توسط کنترلرهای حلقه بسته هدایت میشوند. این موتورها برای منبع تغذیه به اینورتر یا SMPS نیاز دارند. این موتورها دارای آهنرباهای دائمی هستند که یک آرمیچر ثابت را میچرخاند. برخلاف موتورهای Brush DC، آنها دارای کنترل الکترونیکی حلقه بسته به جای مونتاژ کموتاتور هستند. این موتورها معمولاً در رباتیک صنعتی استفاده میشوند که در آن کنترل دقیق حرکت و موقعیت مورد نیاز است. با این حال، این موتورها بسیار گران هستند و دارای ساختار پیچیده و الکترونیکی هستند.
انتخاب موتور برای ربات
برای انتخاب یک موتور الکتریکی مناسب باید پارامترهای مختلفی مانند باری که یک موتور خاص میتواند تحمل کند، گشتاور مورد نیاز برای حرکت ربات بدون بارگذاری اضافی، چرخش در دقیقه موتور هنگام بارگیری و غیره را در نظر گرفت.
از آنجایی که موتورها انواع مختلفی دارند، بسته به کاربرد، باید یکی از انواع موتورها انتخاب شود. به عنوان مثال، برای اجرای بازوی رباتیک، معمولاً از سرووها استفاده میشود. رباتهای چرخدار طراحی سادهای دارند و با استفاده از چرخهای موتوری روی زمین حرکت میکنند. طراحی و ساخت چرخ ها نیز در مقایسه با مسیرها یا پایهها آسانتر است. استفاده از چرخ دارای معایبی است. برای مثال ناوبری بر روی موانع و سطوح ناهموار یا سطوح لغزنده با اصطکاک کم، حرکت با چرخها آسان نیست.
رایج ترین موتورهای الکتریکی مورد استفاده در این رباتها موتورهای DC هستند. موتورهای DC گشتاور و راندمان بالایی دارند. با اعمال گشتاور در پاسخ به بار، موتور DC مناسب را میتوان با منحنی سرعت و گشتاور مشخص کرد. معمولاً ولتاژ ترجیحی موتورهای DC مورد استفاده در رباتهای سرگرمی 3، 6، 12 و 24 ولت است. اگر ولتاژی کمتر از ولتاژ ارائه شده در برگه اطلاعات فنی موتور، به آن اعمال شود، گشتاور بر اصطکاک داخلی – بیشتر از طریق زغالها – غلبه نمیکند. همچنین، اگر ولتاژی بالاتر از ولتاژ پشتیبانی شده به موتور اعمال شود، ممکن است بیش از حد گرم شود و آسیب ببیند.
ترکیب چرخ برای یک ماشین رباتیک
طبق قوانین فیزیک، یک وزنه بزرگتر، برای شتاب گرفتن نیاز به نیروهای قویتری دارد. این بدان معناست که یک ربات سنگینتر به موتورهای قویتری نیاز دارد تا بتواند شتاب بگیرد. به نیروهای وارد بر وزن ربات، نیروهای اصطکاک چرخ ها و اصطکاک داخلی داخل موتور اضافه میشود. با توجه به اینکه یک ربات باید از پله ها بالا برود یا روی سطوح شیبدار بدود، باید نیروهای دیگری مانند نیروی گرانش را نیز در نظر گرفت.
یک موتور فقط در صورتی میتواند سرعت ثابتی را حفظ کند که گشتاور در مقابل حرکت ربات بیشتر از نیروهای ترکیبی باشد. در صورتی که گشتاور موتور کوچکتر از گشتاور مخالف باشد، موتور متوقف میشود و ممکن است آسیب ببیند زیرا انرژی الکتریکی نمیتواند به گشتاور تبدیل شود.
فرمان و تغییر جهت حرکت
برخی رباتها برای حرکت از فرمان دیفرانسیل استفاده میکنند که به طور جداگانه چرخها را به حرکت در میآورد. ربات میتواند جهت چرخش هر چرخ را با سرعتهای مختلف تغییر دهد و با افزودن چرخهای اضافی که توسط محرکها رانده نمیشوند، ربات میتواند تعادل خود را حفظ کند.
ترکیب دو چرخ با نیروی محرکه به علاوه یک چرخ هرزگرد و یا ترکیبهای مختلفی از چهار چرخ با نیرویی محرکه جداگانه یا مشترک، رایج ترین ترکیبات برای روباتهای چرخدار هستند. رباتی با هر دو ترکیب یادشده میتوانند در جای خود بچرخد. در این حالت به عنوان دیفرانسیل درایو برای نسخه دو چرخ شناخته میشود. در حالی که در ترکیبی از چهار چرخ، چرخها باید به طور مستقل رانده شوند تا ربات در جای خود بچرخد.
- روبات چرخدار با دو چرخ متحرک بعلاوه یک چرخ کاستر

شکل 5: تصویر یک ربات کوچک با دوچرخ متحرک و یک چرخ هرزگرد را نشان میدهد
- ربات چهار چرخ متحرک

شکل 6: یک ماشین ربات معمولی چهار چرخ را از زیر نشان میدهد.
دو چرخ و روش کاستر مزایای خود را دارند از جمله امکان اندازه گیری حرکت با افزودن رمزگذار. برای روش چهار چرخ، افزودن یک رمزگذار میتواند اندازه گیریهای نادرستی را در مقایسه با حرکات واقعی ربات ایجاد کند، اما در عین حال، این سیستم برای کنترل حلقه بسته، بهترین است و چسبندگی بالایی برای لاستیک ها فراهم میکند.
محاسبات مربوط به انتخاب موتور
محاسبات ریاضی زیادی در یافتن موتور ربات بر اساس پارامترهای بسیاری مانند گشتاور، سرعت، دور در دقیقه و غیره وجود دارد. شما میتوانید، محاسبات مربوط به انتخاب موتور را از وب سایت Botskool بررسی کنید. استفاده از ماشین حساب آنلاین شاید سادهترین و دقیقترین روش برای یافتن موتور الکتریکی مناسب برای یک پروژه باشد. این ماشینحسابها به دادههای ورودی بر اساس ویژگیها و قابلیتهایی که فرد برای یک ربات میخواهد نیاز دارند. پس از پردازش دادهها مشخصات موتور را به شما میدهند. شما میتوانید با جستحجوی اینترنتی این محاسبه کنندگان آنلاین را پیداکنید. ماه لینک دو وب سایت را برای محاسبه مشخصات موتور مورد نیاز در زیر آوردهایم.
ماشین حساب گشتاور موتور RobotShop
محاسبه کننده RMF انجمن روباتها